Week 6: graphs¶
| Subsite home page: | |
|---|---|
| http://bit.ly/focs-aux | |
General strategy¶
(This is not really code, nor pseudocode.)
This is a description of what the algorithm does. This description is closer than the textual algorithm given in the lecture at 08:00 .
Initialise the search tree using the initial state of the problem.
Loop:
- If there are no candidates for expansion, then return failure.
- Choose a leaf node.
- If the chosen leaf matches the goal, then return the leaf.
- If not, then expand the node, and use the strategy to determine how to re-order the new list of candidates, and perhaps filter out the visited nodes.
Note: depending on the expansion, goal, and strategy, there are two reasons why this might never finish.
(answer goes here)
- If we don’t filter out visited nodes, it’s easy to get in an infinite loop.
- If we filter out visited nodes, but there are infinitely many possible nodes, then we can get in an infinite loop.
Exercise: why did we not get in an infinite loop when we searched for the path from B to A in the lecture?
Version 1¶
(* basic algo *)
(* Note that this version does *not* use 'visited'. So
the type of 'strategy' is different.
*)
let rec search
(graph : (char * char * int) list)
expand
(fringe : char list)
goal
strategy
= match fringe with
| [] -> None
| n :: ns when goal n -> Some n
| n :: ns ->
let fringe = strategy ns (expand n graph) in
search graph expand fringe goal strategy
(* roadmap *)
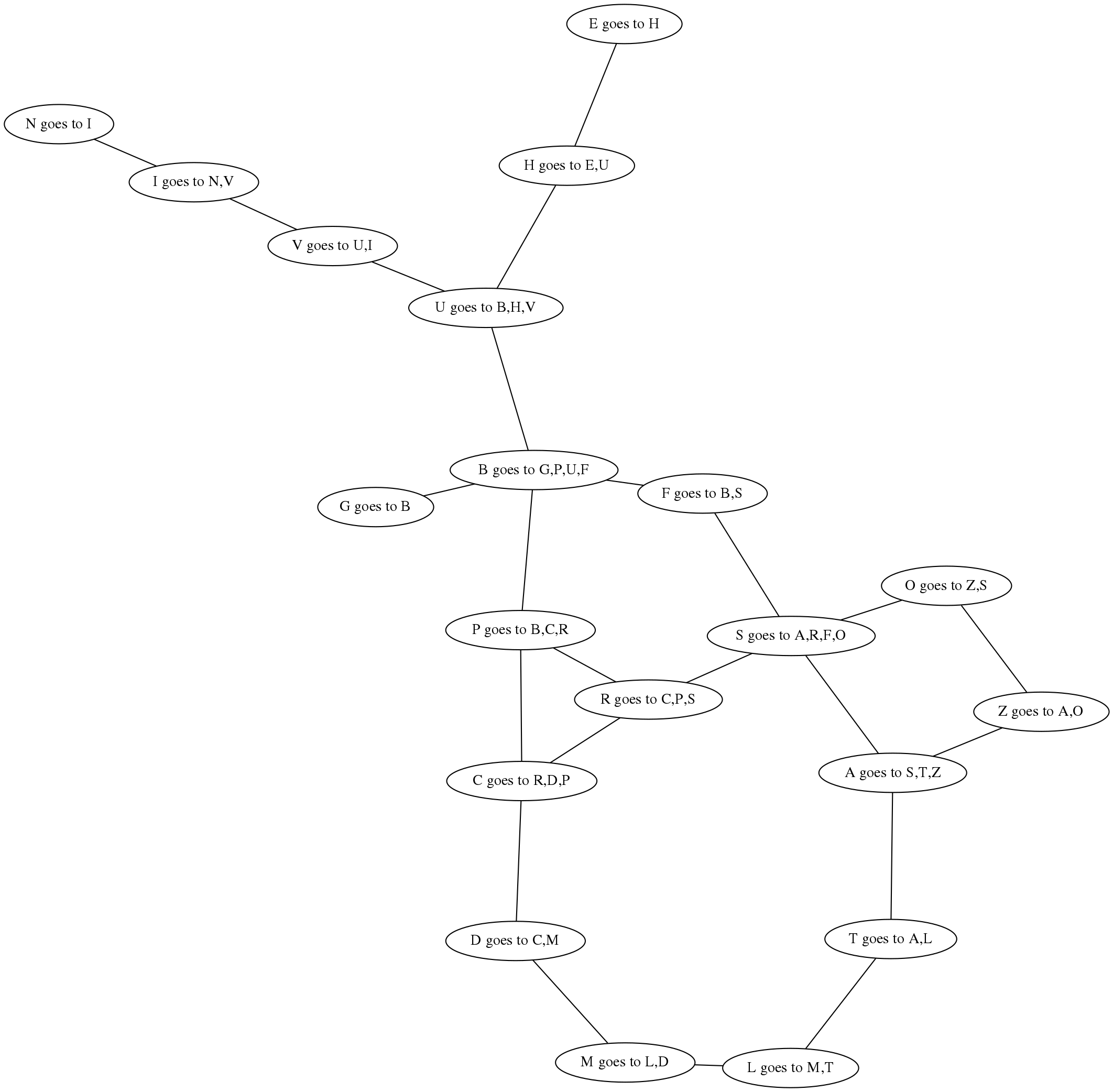
let roadmap =
[ ('A', 'Z', 75); ('A', 'S', 140); ('A', 'T', 118);
('T', 'L', 111); ('L', 'M', 70); ('M', 'D', 75);
('D', 'C', 120); ('C', 'R', 146); ('R', 'S', 80);
('R', 'P', 97); ('S', 'O', 151); ('O', 'Z', 71);
('S', 'F', 99); ('F', 'B', 211); ('B', 'P', 101);
('P', 'C', 138); ('B', 'G', 90); ('B', 'U', 85);
('U', 'H', 98); ('H', 'E', 86); ('U', 'V', 142);
('V', 'I', 92); ('I', 'N', 87)]
let rec expand node = function
| [] -> []
| (n1, n2, _) :: edges when n1 = node ->
n2 :: expand node edges
| (n1, n2, _) :: edges when n2 = node ->
n1 :: expand node edges
| _ :: edges -> expand node edges
(* Different type from 'goal' in the second version! *)
let goal n = (n = 'A')
(* Different type from 'strategy' in the second version! *)
let strategy xs ys = xs @ ys;;
(* In the lecture:
let rec strategy = append;;
Equivalently, we could have written:
let strategy xs ys = append xs ys;;
or:
let strategy xs ys = xs @ ys;;
(* To use:
search roadmap expand ['A'] goal strategy;;
*)
Version 2¶
(* basic algo *)
let rec search
(graph : (char * char * int) list)
expand
(fringe : char list)
goal
strategy
visited
= match fringe with
| [] -> None
| n :: ns when goal n -> Some n
| n :: ns ->
let fringe = strategy ns (expand n graph) (n :: visited) in
search graph expand fringe goal strategy (n :: visited)
(* roadmap *)
let roadmap =
[ ('A', 'Z', 75); ('A', 'S', 140); ('A', 'T', 118);
('T', 'L', 111); ('L', 'M', 70); ('M', 'D', 75);
('D', 'C', 120); ('C', 'R', 146); ('R', 'S', 80);
('R', 'P', 97); ('S', 'O', 151); ('O', 'Z', 71);
('S', 'F', 99); ('F', 'B', 211); ('B', 'P', 101);
('P', 'C', 138); ('B', 'G', 90); ('B', 'U', 85);
('U', 'H', 98); ('H', 'E', 86); ('U', 'V', 142);
('V', 'I', 92); ('I', 'N', 87)]
let rec expand node = function
| [] -> []
| (n1, n2, _) :: edges when n1 = node ->
n2 :: expand node edges
| (n1, n2, _) :: edges when n2 = node ->
n1 :: expand node edges
| _ :: edges -> expand node edges
let goal n' n = (n = n')
let rec strategy fringe newnodes visited =
let rec remove xs ys = match xs with
| [] -> []
| x :: xs ->
if List.mem x ys
then remove xs ys
else x :: remove xs ys in
remove (newnodes @ fringe) visited
(* To use:
search roadmap expand ['A'] (goal 'B') strategy [];;
*)
Simplification of expand¶
As discussed in the tutorial.
let rec expand node edges = match edges with
| [] -> []
| (n1, n2, _) :: edges ->
if n1 = node then n2 :: expand node edges
else if n2 = node then n1 :: expand node edges
else expand node edges
Things to explain¶
- Expand
- Strategy
- Goal
Visualisation of data from the graph¶